서강대 최정우 교수 - 하버드대 케빈 키트 파커, 박성진 교수 연구팀
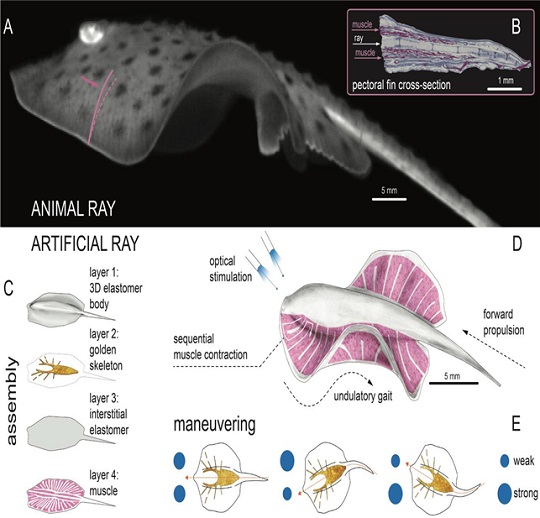
(A) 가오리 외부 구조 (B) 가오리 내부 구조 (C) 가오리 형태 바이오 로봇 제작도 (D) 바이오 로봇 구동 원리
[대전=일요신문] 육심무 기자 = 생체조직과 기계적인 지지대로 구성되어 내부 동력기관 없이 자유롭게 유영하는 바이오 로봇이 처음 개발되었다.
미래창조과학부는 생체조직과 무기물의 결합으로 전기없이 움직일 수 있는 바이오 하이브리드 로봇(이하 바이오 로봇)을 국내 연구진과 해외 연구진이 공동연구를 통해 세계 최초로 개발했다고 8일 밝혔다.
바이오 하이브리드 로봇은 세포, 조직 등으로 이루어진 생체물질 부분과 무기물로 구성된 기계적인 부분이 결합된 로봇이다.
이번 연구는 미래창조과학부의 해외우수연구기관유치사업(GRDC) 지원을 통해 설립된 서강-하버드 질병 바이오물리 연구센터의 국제 공동연구진(서강대 최정우 교수 - 하버드대 케빈 키트 파커 교수와 박성진 교수 연구팀)이 수행했으며, 연구 결과는 국제적으로 권위 있는 과학 학술지 사이언스(Science)지에 7월 8일자 표지 논문으로 게재되었다. ( 논문명 : Phototactic guidance of a tissue-engineered soft-robotic ray)

박성진 교수
이번에 개발된 바이오 로봇은 생체세포와 무기물이 결합한 가오리 형태의 로봇으로 내부의 동력기관 없이 물속에서 유영이 가능하다.
이 로봇은 실제 가오리의 운동과 유사한 운동을 보이며 최대 2.5mm/sec의 속도로 움직인다는 것을 양 날개의 수축-이완 운동의 동력학적, 유체역학적 분석을 통해 수 있음을 확인했다.
빛의 자극에 반응하도록 조작한 세포를 로봇의 뼈대에 근육조직으로 배양하고, 근육이 빛의 빈도 등에 따라 수축-이완하게 함으로써 로봇이 움직이는 원리이다.
바이오 로봇 가오리의 양 날개에 가하는 광 자극의 빈도를 조절하여 각 날개의 수축-이완 운동을 개별적으로 조절함으로써 로봇 가오리의 이동뿐만 아니라 방향전환도 가능함을 확인했다.
배양세포로는 쥐의 심근세포를 이용하였으며, 바이오 로봇의 근육구조와 물속에서 유영하는 움직임은 실제 가오리와도 유사하다.
국제 공동 연구팀은 생체조직과 무기물 구조가 결합하여 전기없이 빛의 자극에 의하여 유영할 수 있는, 유전자 조작으로 빛에 의해 반응하는 세포 조직을 만들어(광유전 기술) 이를 마이크로 가공 기술로 제작된 구조체 위에 올려서 가오리 형태 바이오 로봇을 제작했다.
서강대 최정우 교수 연구팀은 바이오 로봇의 제조 공정에 참여하여 부력을 조절하는 부분을 제작함으로써 로봇이 앞쪽을 향해 수영할 수 있게 했다.

케빈 키트 파커 교수
기계로만 구성한 로봇은 많이 개발되고 있으나 인간과 같이 세포 조직으로 만들어진 로봇은 아직 개발하지 못하고 있는 상황으로, 현재 만들어진 바이오 로봇은 형상 제작은 가능하나 내부의 전기 동력 없이는 구동되지 못한다.
이 연구 성과는 생체세포와 무기물을 결합한 움직이는 바이오로봇 기술로써, 세포 조직으로 구성되어 유영이 가능한 바이오 하이브리드 로봇 개발은 세계 최초이다.
이는 향후 세포와 기계가 결합된 바이오 하이브리드 로봇 개발 및 인간 질병의 바이오 센싱 기술 개발 등에 폭넓게 사용될 전망이다.
최정우 교수는 “이번 연구를 통하여 생체조직과 기계가 결합된 바이오 로봇의 가능성이 제시되었으며, 향후 인공 지능 기술과 결합하여 인간과 같은 로봇의 개발로까지 확장될 수 있는 토대를 마련하였다”면서 “이번 성과는 국제공동연구 수행에 있어 우리 국내 연구역량의 경쟁력을 보여주는 사례”라고 말했다.

최정우 교수
한편, 인간을 포함한 동물이나 물고기, 곤충 등의 기본구조 또는 메커니즘 등을 모방하여 생물체의 조직이나 근육처럼 부드럽고 유연하면서도 충분한 강도를 가지는 물질과 이를 제어하는 기술을 개발하는 생체모방공학 분야가 주목받고 있다.
전기활성고분자나 형상기억합금, 가압유체 등이 실제 생명체와 생체모방로봇의 간극을 줄이는 물질로 이용되고 있으나 아직까지 신체 내 근육 운동의 정교한 모사에는 한계를 보이고 있다,
smyouk@ilyodsc.com