
연구팀과 수중 촬영 로봇. 사진=포스텍 제공
[포항=일요신문] 임병섭 기자 = 포스텍(POSTECH·포항공과대학교)은 창의IT융합공학과 유선철 교수와 조현우 연구교수, 석박사 통합과정 표주현씨가 바닷속에서도 밀리미터(㎜)단위의 정밀한 위치 이동이 가능한 수중 촬영로봇 ‘Cyclops(싸이클롭)’을 개발, 국내 최초로 3차원 해저 지형도 및 실사 모형 제작에 성공했다고 8일 밝혔다.
로봇을 이용해 촬영된 기존 수중 영상은 높은 해상도를 구현하거나 로봇의 이동에 따른 영상 간의 변화를 최소화하는 일이 어려워 2차원 수준의 이미지에 머물렀다.
2차원 데이터로는 수중 지형을 필요만큼 정확하게 파악할 수 없어 이를 개선하기 위한 다각도의 연구가 이뤄졌으나 실제 3차원 지형을 구현할 정도의 고해상도의 이미지는 얻지 못했다.
수중 로봇을 정밀하게 제어할 수 있는 방안도 중점 연구돼 왔으나 다양한 변수가 존재하는 해양환경에서 실질적인 효과를 거두기는 어려웠다.
유 교수팀은 정밀한 위치 제어 성능에 초점을 맞춰 벌크 업한 로봇을 설계·제작해 이러한 문제를 해결했다.
기존 수중로봇과는 달리 드론처럼 전후·좌우·상하 어느 방향으로도 직진 이동이 가능하도록 각 방향에 전용 추진기를 장착, 사전에 설정된 촬영 지점에 정확하고 효율적으로 도달할 수 있도록 했다.
싸이클롭은 수중에서 촬영 지표 수백 개를 따라 이동하며 자동으로 사진을 촬영해 육상에서 지형 계측을 위해 촬영된 이미지와 견줄 만한 고화질의 수중 지형 데이터를 얻었다.
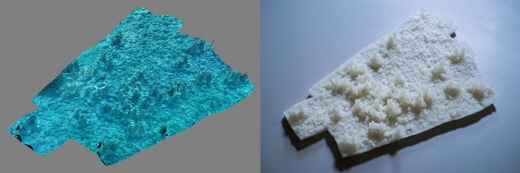
촬영 이미지(왼쪽)과 3D프린팅. 사진=포스텍 제공
유 교수팀은 얻은 데이터를 3차원 수중 지형도로 제작, 3차원(3D) 프린터를 이용해 수중 지형을 정확한 비율로 축소한 실사 모형을 구현했다.
이번 연구 성과를 통해 다양한 해저탐사와 지형계측의 새로운 가능성이 열릴 것으로 연구팀은 전망했다.
수 센티미터(㎝)의 변화도 알아볼 수 있을 만큼 정밀한 데이터를 얻을 수 있어 지질·생물학 관점의 주기적 해저 환경 변화 조사에 활용하면 어업에 심각한 손실을 입히는 백화현상이나 지각변동 등도 예측 가능하다.
광범위한 지역을 포괄적으로 파악할 수 있는 해저 초음파 영상조사와 함께 사용하면 상호보완적인 효과를 거둘 수 있을 것으로 기대된다.
또 화질이 우수할 뿐만 아니라 정확한 3차원 좌표 데이터를 기반으로 하고 있어 해저터널 등 인프라 건설 및 군사 목적을 위한 해저 지형 조사에 효과적이다.
유 교수는 “싸이클롭을 통해 촬영된 영상은 항공기나 드론으로 지상을 촬영하는 작업을 수중에서 했다고 볼 수 있다”며 “3D 프린터 출력을 통한 실사 지형도를 직관적으로 활용할 수 있어 수중 환경 정보를 필요로 하는 많은 분야에 큰 도움이 될 것”이라고 말했다.
이 연구는 2016년 해양수산부의 재원으로 한국해양과학기술진흥원의 지원을 받아 수행됐다.
ilyodg@ilyo.co.kr